 400 025 3599
400 025 3599 




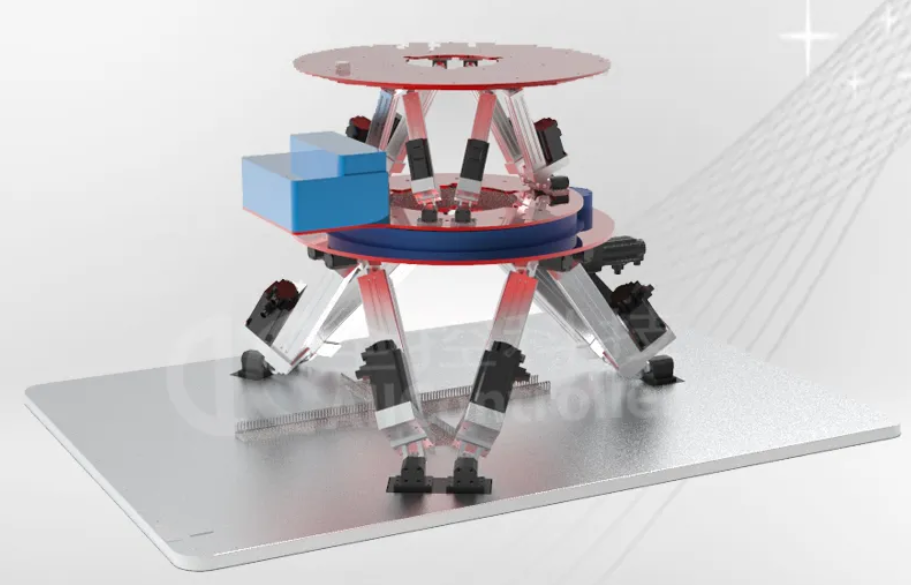
Stewart六自由度并聯(lián)平臺(tái)的LocLab運(yùn)動(dòng)學(xué)及PowerLab動(dòng)力學(xué)分析是后續(xù)結(jié)構(gòu)優(yōu)化及控制器設(shè)計(jì)的基礎(chǔ),因此研究其運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)理論具有重要的意義。目前針對(duì)Stewart平臺(tái)的動(dòng)力學(xué)模型分析方法主要有拉格朗日法(Lagrange)和牛頓歐拉法(Newton-Euler)兩種。其中,拉格朗日法只需計(jì)算系統(tǒng)的動(dòng)能和勢(shì)能就能確定系統(tǒng)的動(dòng)力學(xué)特性,因此該方法相對(duì)比較簡(jiǎn)單且有利于控制策略的制定。

針對(duì)所設(shè)計(jì)的Stewart六自由度并聯(lián)平臺(tái)TecPlat進(jìn)行了運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)分析,并在此基礎(chǔ)上通過Adams軟件建立了模型的動(dòng)力學(xué)模型及振動(dòng)模型,分析Stewart六自由度并聯(lián)平臺(tái)動(dòng)力學(xué)模型振動(dòng)特性,為提高Stewart六自由度并聯(lián)平臺(tái)TecPlat控制精度提供理論與技術(shù)支持。
通過Adams進(jìn)行多體動(dòng)力學(xué)仿真,不僅可得到系統(tǒng)各部件的位移(轉(zhuǎn)角)、速度和加速度之間的關(guān)系,還可得到平臺(tái)以不同姿態(tài)運(yùn)動(dòng)時(shí)各電動(dòng)缸推力、功率的動(dòng)態(tài)變化,為六自由度并聯(lián)機(jī)器人的設(shè)計(jì)、選型、優(yōu)化提供理論基礎(chǔ)。
Adams利用帶拉格朗日乘子的第一類拉格朗日方程導(dǎo)出——最大數(shù)量坐標(biāo)的微分—代數(shù)方程(DAE)。它選取系統(tǒng)內(nèi)每個(gè)剛體質(zhì)心在慣性參考系中的三個(gè)直角坐標(biāo)和確定剛體方位的三個(gè)歐拉角作為笛卡爾廣義坐標(biāo),用帶乘子的拉格朗日第一類方程處理具有多余坐標(biāo)的完整約束系統(tǒng)或非完整約束系統(tǒng),導(dǎo)出以笛卡爾廣義坐標(biāo)為變量的動(dòng)力學(xué)方程。
在進(jìn)行機(jī)械結(jié)構(gòu)設(shè)計(jì)時(shí),靜強(qiáng)度理論已經(jīng)逐漸不足以滿足設(shè)計(jì)的全部需求。振動(dòng)理論、動(dòng)力學(xué)分析理論在很大程度上改變了人們的設(shè)計(jì)理念。同時(shí),人們也越來越關(guān)注機(jī)械設(shè)備的動(dòng)態(tài)性能,提出了更高的要求。
通過使用功能完善的有限元分析軟件,借助于高性能的計(jì)算機(jī)硬件對(duì)工業(yè)機(jī)器人進(jìn)行詳盡的動(dòng)力學(xué)分析,運(yùn)動(dòng)特性分析,以獲得盡可能接近真實(shí)情況的結(jié)構(gòu)受力信息,就可以減少在設(shè)計(jì)階段出現(xiàn)的各種問題,并且可以根據(jù)這些計(jì)算結(jié)果對(duì)設(shè)計(jì)參數(shù)進(jìn)行優(yōu)化設(shè)計(jì),使其整體結(jié)構(gòu)具有良好的動(dòng)態(tài)性能,這些因素將直接影響到機(jī)器人的使用動(dòng)態(tài)精度穩(wěn)定性和可靠性。





 在線咨詢
在線咨詢 




